Robot final. Después de unos meses
sin terminar el robot de iniciación.. dejo aquí lo que
desde mi punto de vista son los mejores componentes disponibles para
realizar un robot velocista, sin gastarse una fortuna y obteniendo un
resultado aceptable.
Precio total: $87.66 aproximadamente. Precio con cargador y programador: $111 aproximadamente.
Sumandole los $11 de envio de pololu, y teniendo que comprar una placa
de circuito impreso o de topos, más el material para hacer la
base (pvc expandido 3mm) el coste del robot con el cargador y programador pues se queda
aproximadamente en 100 €, según el cambio.
Si no tenemos un programador para la Baby Orangutan las elección
clara es comprarlo con la placa, no vamos a encontrar nada más
barato y además nos servirá para programar micros. A la
hora de elegir los motores hay dos posibilidades, unos que consumen
más corriente (el HP) y otros que consumen menos. La
electrónica está dimensionada para el motor de menor
consumo ya que se va a usar un conversor dc-dc que limita la intensidad
de entrada a 2 A, por lo que éste cortará la
alimentación si usamos los motores de más corriente e
intentamos ponerlos al máximo. Pero al máximo no los
vamos a poner ya que la velocidad sería muy alta, por lo que se
pueden tener ciclos de trabajo del pwm con bastante velocidad sin que
el dc-dc llegue a cortar, creo recordar que a partir de 200/255 el
dc-dc decía basta.
De momento no se ha quemado nada de la electrónica usando los
motores HP (ya tienen varias horas de funcionamiento) y el resultado es
un poco mejor que con los motores de menos intensidad, aunque si no
queremos arriesgarnos a quemar nada (no he mirado el datasheet del
integrado del dc-dc por lo que no sé si corta o que hace) la
elección es el motor de menos intensidad, aunque yo diría
que el otro es la primera elección si vamos a ir a un concurso y
queremos obtener el mejor resultado posible.
La diferencia respecto a la primera versión del Robot Zero es
que se ha cambiado la batería de 7.4V por una de 3.7V. Se ha
añadido un conversor de tensión que sube la
tensión de la batería de 3.xV a una tensión de
salida fija, mediante un potenciometro del dc-dc seleccionamos la
tensión de salida hasta 9.5V, ésto nos sirve primero para
llevar una batería que pesa y ocupa menos y segundo para fijar
la tensión de alimentación de los motores
independientemente del estado de la batería, lo que nos
ayudará a ajustar las constantes necesarias en el programa para
el control del robot. La batería lleva protección contra
sobrecarga y descarga, por lo que cuando se gaste el robot se para, no
corremos el peligro de descargar la lipo más de lo permitido.
La placa de sensores si elegimos la de resistencia la podemos leer de
una forma sencilla de manera digital, que para un robot de
iniciación desde mi punto de vista es lo más acertado.
Con la placa de condensador no la podemos leer de una manera tan
sencilla, pero podemos obtener mejores resultados a costa de complicar
el código. No lo he comprobado experimentalmente y me queda
probar y programar para salir de dudas usando ambas placas, pero cada
lectura, digital y analógica, tiene sus ventajas respecto a la
otra.
Para unir todos los componentes anteriores lo podemos hacer creando una
base donde colocarlos más un circuito impreso/placa de topos
para unir la parte de la electrónica. o usar directamente un
circuito impreso a forma de base para reducir peso.
Algunas ideas de como unirlo todo y diseñar el robot, click en las imagenes para mayor tamaño y ver componentes.
Acertar con un buen diseño de base es fundamental, podemos
elegir hacer un robot de un máximo de 20 cm de ancho y 30 cm de
largo, 2 Kg de peso. Cuánto más largo sea antes veremos
la curva pero más lejos estará el centro de inercias del
punto medio del eje que une los motores (que es el punto ideal para
todos los centros). Cuanto más ancho sea el robot mayor
será el par que hace la rueda, es decir más inercia
podemos contrarrestar sin derrapar, pero por contra mayor será
el tiempo de giro y más posibilidades tenemos de tocar la
línea roja. Siendo más pesado aumentamos nuestra normal
pero mayor será la fuerza que nos echa hacía fuera en la
curva, y aumentamos las inercias enormemente si la masa está mal
distribuida.
Todo consiste en encontrar un equilibrio de base de robot para los
motores seleccionados y la fuerza de rozamiento que vamos a encontrar,
y ésto no es cosa fácil, almenos para mi que poco
sé de mecánica. Por mucha electrónica que
pongamos, mucha programación que vayamos a hacer, si la base
está mal diseñada de nada sirven.
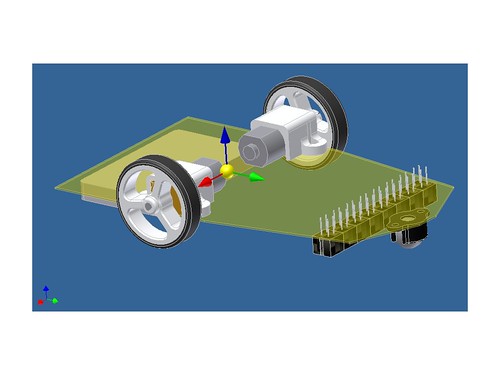
Buscar un buen diseño es fundamental. CAD de Raúl.
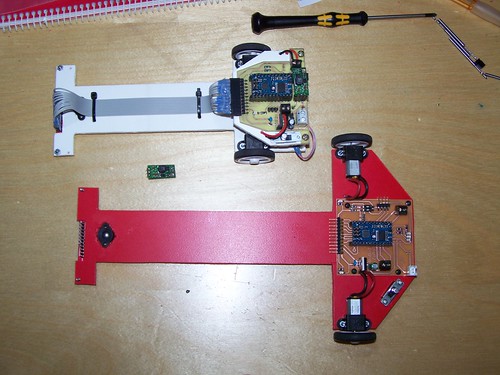
Recopilo el resultados de los robots
anteriores, el código es el mismo en todos y aún no se ha
trabajdo en éste, es un código básico para seguir
la línea a velocidad constante. Todos llevan una placa de
sensores con resistencia en el colector del fototransistor, y la
lectura se hace en digital. Falta programar los interruptores para
seleccionar distintas opciones, el ejemplo se puede sacar de entradas
anteriores.
Robot Blanco. Fotolito pcb sin dc-dc. La última versión lleva el dc-dc pero en un formateo olvidé salvar el fichero. Código. dc-dc 8.5 V. Motor 10:1 baja intensidad.
Video funcionamiento.
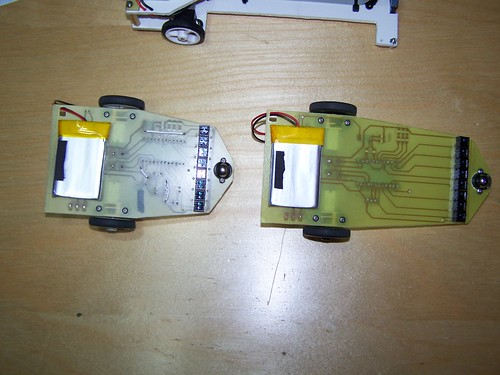
Robot pcb largo. PCB 0.4 mm. Fotolito. Código. Motor HP 10:1 alta intensidad. Placa de sensores de resistencia hecha con CNY70. dc-dc 6.4 V.
Video funcionamiento.
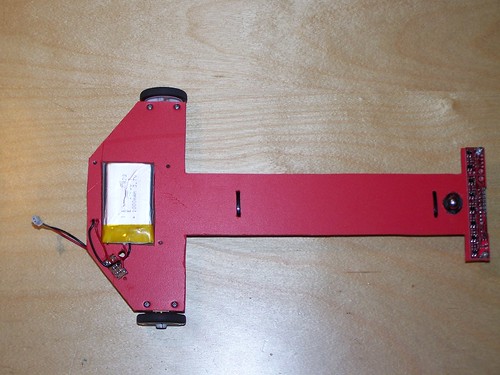
Robot rojo. Fotolito. Código. Motor HP 10:1 alta intensidad. dc-dc 6.2 V.
Video de funcionamiento. Robot aún sin ajustar.
Robot pcb corto. PCB 0.4 mm. Fotolito. Código. Motor 10:1 baja intensidad. dc-dc 8.5 V.
Video funcionamiento.
Pues con estas ideas doy por finalizado el robot de
iniciación, son robots con los que se puede llegar a los 150
cm/s y con trabajo superarlos. No vamos a quedar en las primeras
posiciones pero tampoco en las últimas, por lo que es
válido como un primer robot. Decir que ésto no pretende
ser una guía exacta ni acertada de como hacer un robot
velocista, ya que no tengo los conocimientos suficientes para abarcar
muchas de las cuestiones que surgen en su desarrollo. La única
intención ha sido rellenar un poco el enorme vacío de
información que hay sobre el tema en internet, desde un punto de
vista básico y desde mi corta experiencia yendo a concursos.
El código es bastante mejorable, no está muy probado y no
se ha modificado desde que se hizó, por lo que puede tener
fallos pero en general parece suficiente para un primer robot leyendo
los sensores en digital. Me comentarón en el C.I.r.E.
(club de electrónica que hemos montado con reuniones semanales)
que había gente que llevaba este código del Robot
Zero en el pasado Co$moBot (concurso de velocistas anual, referencia
por los altos premios), pero no sé que tal les funciono ya que no se
han molestado en dejar un mensaje contandome el resultado, en fin,
grandiosa comunidad online que tenemos!.
Pasar los 2 m/s como lo hacen los robots que ocupan los primeros
puestos es complicado y requiere bastante trabajo. Aunque siempre ves
al típico por los foros de internet que suelta que pasa los
"2
m/s con creces" a la vez que demuestra sus pocos conocimientos del
tema, ni
caso, pasar 2 m/s en un circuito medio en dificultad, ha sido bastante
complicado, y sólo lo han hecho unos pocos en los concursos en
España, y por lo general es gente que lleva años y
años participando. Y
por supuesto que no se molestan en subir cosas a internet para que el
resto de los que empiezan puedan aprender y no tengan que partir de
Zero, muy lógico el punto de vista, la mejor forma de avanzar y
evolucionar que tiene una comunidad es no compartir los avances
individuales XD. Y hoy en día si no compartes en internet, no
compartes.
Lamentablemente la robótica en España tiene muy poco
interés, por lo que para empezar lo mejor es buscarse un grupo
de amigos con los que hacer los primeros robots e intercambiar ideas.
De internet poco se puede sacar, no hay ninguna comunidad online
decente sobre robótica de aficionados, con gente con
conocimientos interesada en compartir y trabajar, y ya sabéis
que en esto de la electrónica todo lo que echa humo malo es ;).
Para cualquier duda sobre todo ésto, idea, etc... : foro.
Gracias por leer, nos vemos en el Co$moBot (si me dejan entrar XD).