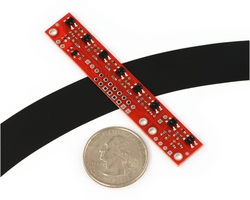
Se va a realizar el primer intento de robot velocista con la placa de sensores QTR-8A en lugar de la inicialmente seleccionada QTR-8C
,por razones de simplicidad, si el resultado no es bueno pues
habrá que considerar el uso de la placa QTR-8C que implica
complicar el código a cambio de tener una lectura
analógica de la línea, pero en principio con la QTR-8A
debería bastar. Fisicamente
las dos placas son iguales en cuanto a tamaño y posición
del conector, por lo que se pueden sustituir una por otra sin
problemas, para leer ambas en digital. La
placa QTR-8A está pensada para leer un valor analógico de
tensión, que se corresponde con la posición de la
línea respecto al sensor. Para
este robot no se va a leer el valor analógico que requiere el
uso de un ADC, en la Baby Orangutan se tienen 8 ADCs quitando el
potenciometro de usuario, por lo que se podría usar para una
lectura en analógico de esta placa de sensores. Se van a leer
los sensores en digital, es decir detectaremos cuando la línea
está bajo el sensor. Leyendo de esta forma tenemos un error de
la medida correspondiente al espacio entre sensores, pero que podemos
considerar despreciable en cuanto a la ubicación del robot
respecto a la línea. Si ésto no resulta posible
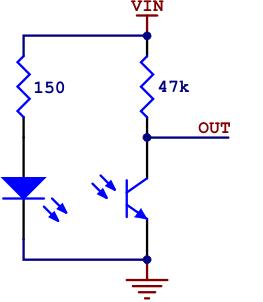
habrá que utilizar la otra placa. Para
leer el sensor simplemente hay que configurar el pin del micro que va
conectado al cada sensor como entrada, y ver si está a uno o a
cero. Si está a uno significa que la línea negra
está debajo del sensor, y si está a cero el sensor se
encuentra sobre blanco, así de fácil. Tenemos
8 sensores y queremos que la línea se sitúe en el centro
de la placa de sensores, a cada sensor le debemos asignar un valor
numérico que representa la distancia del sensor al centro de la
placa de sensores (punto medio de los dos sensores centrales).
Tenemos 8 sensores y los nombramos de izquierda a derecha: I3 I2 I1 I0
D0 D1 D2 D3, al punto medio entre I0 y D0 le asignamos el valor 0, a
los sensores de la derecha de D0 a D3 los valores 1, 3, 5, 7 y a los de
la izquierda de I0 a I1 los valores -1, -3, -5, -7.
I3 -7
I2 -5
I1 -3
I0 -1
D0 1
D1 3
D2 5
D3 7
Si la línea está sobre el sensor I2 tenemos un error de
-5, si está sobre D1 un error de 3, etc... Al leer la placa de
sensores debemos calcular un error (distancia de la línea al
punto medio de la placa de sensores), que se corresponde con la suma de
los valores de todos los sensores a 1 dividida entre el número
de sensores a 1. A la hora de hacer
divisiones con estos micros debemos evitar que en el resultado tengamos
decimales, ya que hacer este tipo de operaciones le llevan mucho tiempo
al microcontrolador, siempre que se divida hay que buscar resultados
enteros.
Con estos valores siempre vamos a obtener números enteros de
error al dividir (los sensores a 1 han de ser consecutivos). Si tengo 2
sensores a 1, por ejemplo 3 y 5, resto al primero
1 y se lo sumo al segundo, tengo 4 y 4 que es lo mismo que 2*4, que
entre dos sensores activos obtengo error=4. Si tengo 3 sensores -1 , 1,
y 3, resto dos al último y se lo sumo al primero y me queda 1,1
y 1 que es lo mismo que 3*1 y entre 3 activos queda el error=1, y
así en adelante...
Por lo que una función para leer los sensores sería la siguiente:
La función devuelve un valor que se corresponde con la distancia
de la línea al centro de la placa de sensores, podemos tener
valores comprendidos entre -7 y +7, cuando el robot esté en el
centro el valor devuelto será cero. Si el robot no lee
ningún valor devuelve el valor cero, esto se debe cambiar
devolviendo por ejemplo el valor -9 si el último sensor que se
ha leído está a la izquierda y el robot ve todo blanco, y
+9 si el último sensor leído estaba a la derecha.
También se puede implementar un giro máximo a la
izquierda o a la derecha cuando el robot pierda la línea.
De momento se deja así y para comprobar la lectura de los sensores se hace el siguiente bucle principal:
Tenemos la variable velocidad que
recibe el valor de la llamada a la función anterior,
obtener_error(), cuanto más alejada esté la línea
del centro de la placa de sensores más rápido gira la
rueda del motor correspondiente, para fijarnos que todo funciona
correctamente pasamos la línea negra por toda la placa despacio,
y vemos como el motor va aumentando o disminuyendo su velocidad
según se aleja o se acerca la línea al centro. Código completo.
También un código para probar
el robot sobre la pista a una velocidad lenta y sólo con error
proporcional, para ver si es capaz de andar.... La rueda loca trasera
la voy a quitar, ya que si se encuentra con superficies no lisas como
la que tengo aquí el robot pierde tracción al tener 4
puntos de apoyo, por lo que habrá que equilibrar o quizás
pensar en una nueva base, ya que el pvc expandido de 3mm tiene
demasiada flexibilidad.
Video prueba de sensores y primeros pasos del robot.
La primera impresión es que no me gustan ni los sensores ni la base =(.