Con
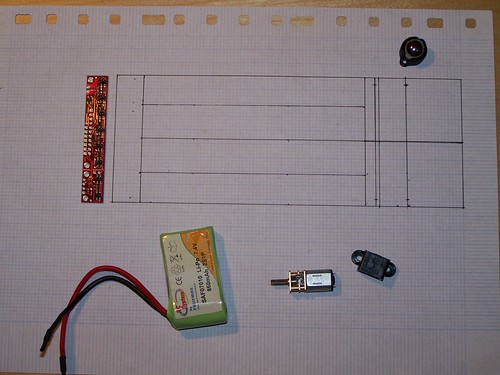
los componentes seleccionados lo primero es montar una base, el proceso
es bastante sencillo ya que los motores y las ruedas están
diseñados para encajar directamente, y los soportes para fijar
el motor a la base del robot también lo venden hecho a medida,
por lo que simplemente es cortar un trozo de plástico, madera,
etc.. con la forma deseada y fijar los componentes.
Para hacer la base utilizo una lamina de PVC espumado, de 4mm, suelen
venderlas en bastantes sitios de diversos tamaño. En este caso
tenía una de 20 cm x 20 cm y la voy a utilizar para hacer una
primera idea de base. Las ventajas de este material es que es muy
ligero y muy fácil de trabajar y estéticamente resulta
mejor que la madera, desventaja su flexibilidad en piezas largas.
El robot tiene que tener unas dimensiones inferiores a 30 cm de largo y
20 cm de ancho, y no puede superar los 13 cm de altura. Para
diseñar la base habría que hacer un análisis
mecánico de como influyen las distintas dimensiones en el
movimiento del robot, por ejemplo cuanto más ancho sea el robot
mayor tendrá que ser la diferencia de velocidad de los motores
para girar con un ángulo, cuanto más largo más
espacio tendremos entre el centro de gravedad y la placa de sensores
por lo que nos podemos anticipar a la curva, pero también
será mayor el peso o las inercias, mayor será la derivada
del error de los sensores para una velocidad de giro, etc.. Son muchas
variables que analizar, y en pricipio poco sé de mecánica
para poder hacerlo, por lo que en un primer diseño sólo
voy a seguir 3 criterios: primero hacer el robot lo más
ligero posible ya que los motores no son muy potentes. Segundo que el
centro de gravedad del robot esté sobre el eje de las ruedas, de
esta forma tendremos la máxima tracción y facilitaremos
el giro del robot, y tercero que el centro de gravedad del robot
esté lo más lejos posible de la placa de sensores para
anticiparnos a las curvas.
Con estas ideas voy a utilizar la longitud máxima de la plancha
que tengo, 20 cm de largo, y la anchura en principio la mínima
posible por quitar peso 7.5 cm de base, que es lo necesario para que
encaje bien la batería, habría que estudiar como influye
la distancia entre ejes ya que es bastante importante en estos robots.
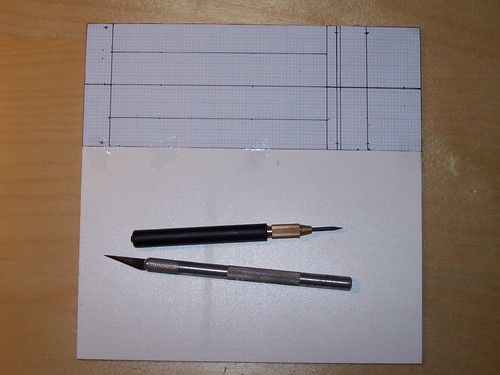
Lo primero es tomar medidas y dibujarse una plantilla del diseño
de la base del robot que se utilizará para cortar, lo mejor es
hacerlo con cualquier programa de dibujo para ser totalmente precisos,
o dibujarlo a mano con bastante cuidado.
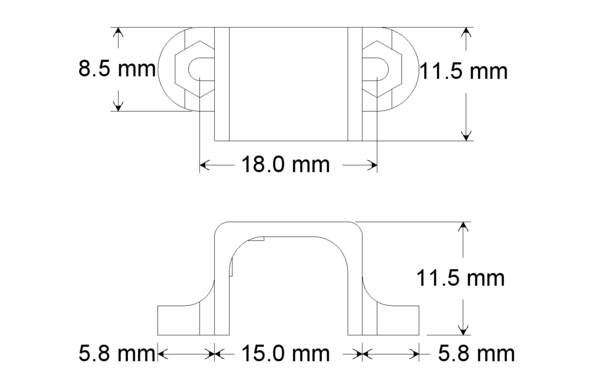
De su página podemos sacar las dimesiones de varios de ellos,
por lo que nos evitamos tener que medir a mano con el consiguiente
error.
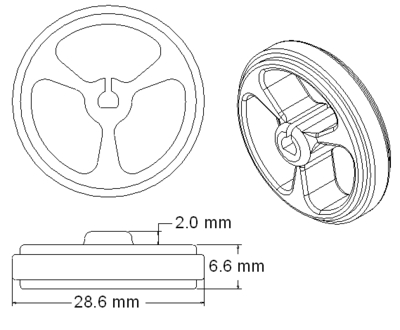
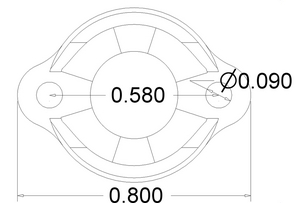
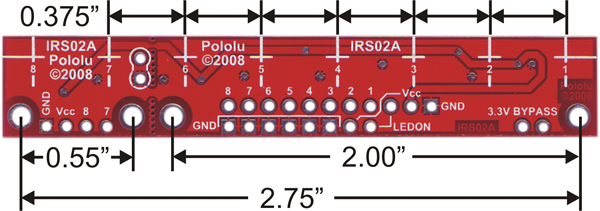
Imagenes de www.pololu.com
Soporte de los motores.
Rueda.
Rueda loca.
Placa de sensores.
Dimensiones en pulgadas y centimetros.
Con estas dimesiones dibujamos la plantilla de nuestra base que
después utilizaremos para cortar el robot. Click en las imagenes
para mayor resolución.
Situamos la plantilla encima del PVC con los taladros marcados y
procedemos a marcar sobre el PVC las líneas de corte con una
cuchilla y un punzón.
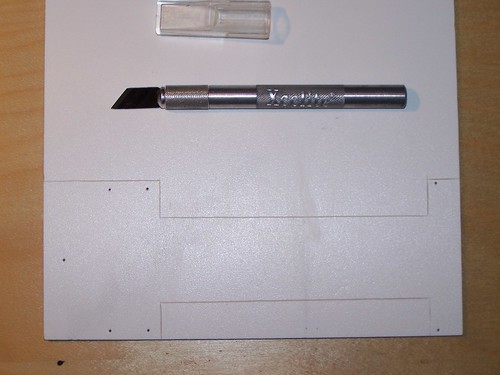
Una vez marcado pasamos a cortar la pieza con otra cuchilla, el PVC es
un material muy blando que se corta con facilidad, no necesitaremos
ningún tipo de herramienta.
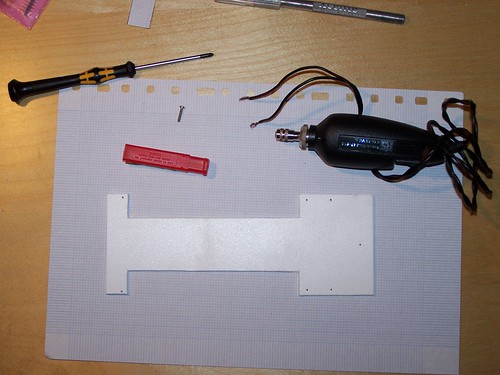
Y hacemos los taladros que hayamos marcado. No es necesario un taladro,
con una broca o un destornillador y girandolo con la mano suele ser
suficiente.
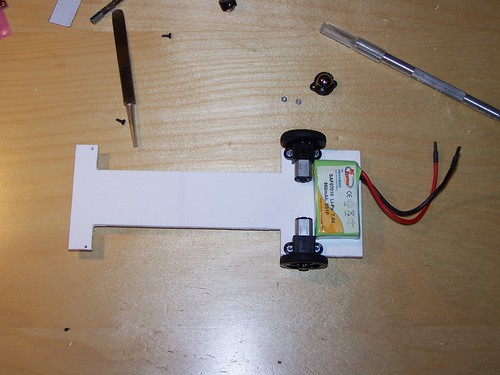
El resultado final del montaje queda así.
Si
hemos hecho bien los cálculos (en este caso hacer más
ancha o menos ancha la parte entre los motores y los sensores
será la solución del cálculo para colocar el
centro de gravedad) el centro de gravedad para la base estará
sobre el centro del eje de los motores, y la base tendrá que ser
capaz de sostenerse sobre las dos ruedas sin tener puesta la rueda loca
o tercer punto de apoyo. Aún faltan componentes por
añadir y ya se equilibraran después, los principales que
más peso añaden son los de la base.
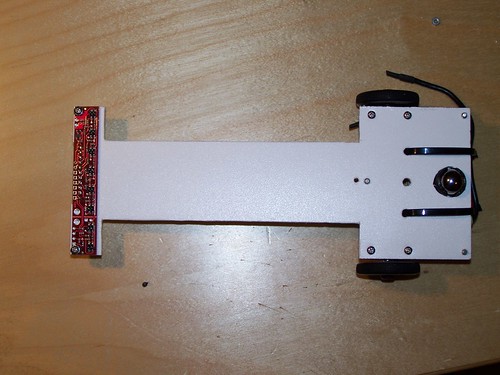
Por
último colocamos la rueda loca, haciendo un agujero a
través de la base partiendo del taladro inicial (es recomendable
dibujar el diametro de esta rueda en la plantilla y marcarlo con la
cuchilla en la base), la altura que queda más o menos es similar
a la de las ruedas y no hace falta ajustar. Se recorta un poco la parte
delantera para sacar los conectores de los sensores. Con tubos
metálicos como el que se ve en la foto que en un lado tienen un
tornillo macho y en el otro la parte hembra, se usará para
colocar una segunda plataforma con la electrónica, pulsadores,
leds, etc..
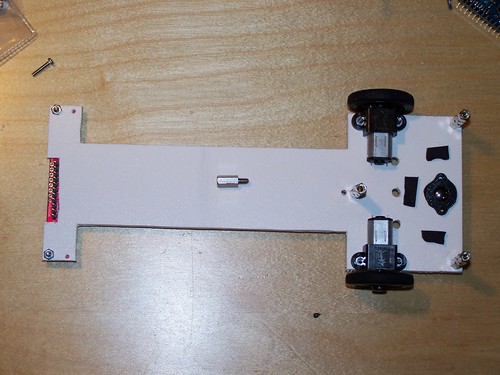
Vista inferior.
Se
monta un tornillo un poco alto para evitar que los sensores choquen
contra el suelo, al ser el PVC bastante flexible podemos tener alguna
ooscilación, con el tornillo de esta forma también
garantizamos que haya una distancia mínima siempre del sensor al
suelo, ya que si estuviera totalmente pegado no podría leer, la
luz que sale del fotodiodo tiene que llegar al foto transistor, y para
ello ha de haber una distancia mínima entre el sensor y el suelo.
El peso total de la base es de 124 gr, lo que resulta un velocista
bastante ligero. Los motores son de 200 gr-cm con 1.6 cm de radio de
rueda, por lo que habrá que ver en la pista que velocidad
conseguimos. En un robot diferencial la aceleración de los
motores es importante, porque disminuimos y aumentamos la velocidad de
cada rueda para realizar los giros.
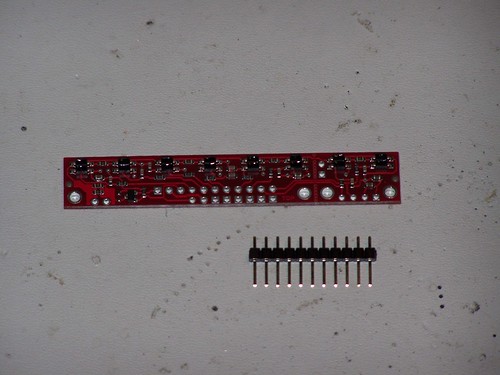
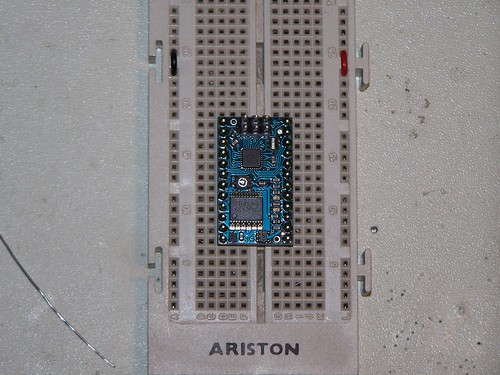
Por últimos tenemos que soldar los conectores que vienen con la electrónica que hemos comprado.
Para soldaduras pequeñas el 14S de JBC con punta de 0.5 mm es ideal.
La placa de microcontrolador + puente en h tiene las dimensiones para
poder ser pinchada sobre una protoboard, lo que vendrá muy bien
para hacer pruebas.
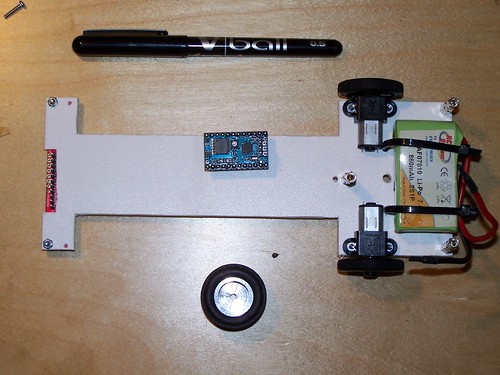
Por lo que la base del robot completa quedaría de esta forma,
para sujetar la batería se han puesto un par de bridas.
Lo siguiente es analizar con detalle la electrónica, la placa de
sensores y la placa del microcontrolador, de las que tenemos librerias
y código de ejemplo de los robots de pololu, una vez hecho
ésto se realizará una placa en la que pinchar la plaquita
del microcontrolador, con puladores, leds, etc..