Un servomotor
está formado por
un motor de corriente continua y una electrónica de control,
su
finalidad es girar cierto ángulo (indicado por una
señal
de mando) el eje del motor que debe mantener esa posición
aunque
apliquemos una fuerza contraria al movimiento del eje, por lo que se
suele usar para la dirección de los coches de radiocontrol,
en
el timón de los aviones rc, etc.. En el proyecto
hexápodo
cada pata del robot está formada por 3 servomotores que
otorgan
3 grados de libertad a la pata, combinando el movimiento de todos los
servomotores el robot conseguirá desplazarse por el suelo.
Las dos principales características del servomotor son las
mismas que las del motor de corriente continua, el par y la velocidad,
es decir que fuerza es capaz de hacer en su eje y la velocidad
ángular de éste. En el hexápodo del
proyecto la
velocidad no es tan importante pero el par sí lo es debido a
que
el robot va a pesar varios kg, además el punto de apoyo va a
estar a varios centímetros del eje del motor debido a la
longitud de las extremidades, por lo que tendremos que seleccionar un
servo de por lo menos 10 Kg-cm para los puntos que vayan a soportar
mayor par.
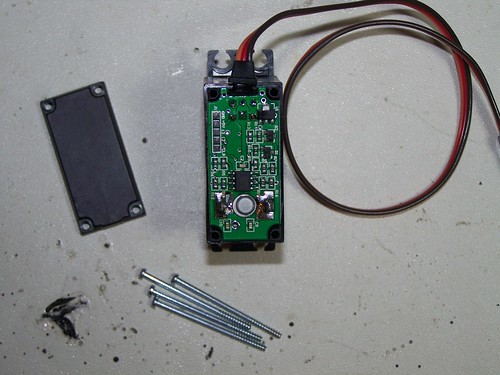
El servomotor está formado por un motor de corriente
continua, un tren de engranajes para aumentar el par de salida a la vez
que se disminuye la velocidad del eje y una
electrónica para controlar la posición del eje
del motor en función de la señal de entrada.
Tapa superior, tren de engranajes.
Tapa inferior, electrónica de control soldada al motor dc.
La señal de control que indica al eje del servomotor
cuántos grados debe girar está formada por un
pulso que
se genera de manera periódica, el servo debe recibir la
señal cada 10-30 ms y la duración del pulso
(tiempo que
la señal de control está a uno lógico
dentro del
período) determina el ángulo que debe girar. Para
que el
servo mantenga la posición hay que mandan un pulso de la
misma
duración de manera periódica, la
duración del
pulso suele estar comprendida entre 0.3 ms y 2.1 ms correspondiendose
con el ángulo máximo y mínimo de giro,
cada modelo
de servomotor tiene sus tiempos pero suelen ser similares a los
anteriores.
Si mandamos una señal con un período mayor o
menor, o un
pulso demasiado largo o corto el servo comienza a vibrar o emitir un
zumbido.
El servomotor tiene tres cables para su conexión, dos son de
alimentación y el otro de la señal de control por
donde
debemos mandar el pulso. Por lo que en principio su control es muy
sencillo, sólo hay que generar un pulso de una
duración
determinada cada 10-30 ms que indica el ángulo que
debemos
girar.
Para contar el tiempo de 30 ms lo mejor es usar la
interrupción
de un timer del microcontrolador que avisa cuando han transurrido los
30 ms mientras el micro hace otras labores, si no utilizamos la
interrupción el micro estaría ocupado de manera
continua
en contar los tiempos necesarios.
Atmega 1280, Timers.
Timer 0. 8 bits. Un timer es una parte del hardware del microcontrolador
que se encarga de contar pulsos de una señal de
reloj
permitiendo ejecutar código cada cierto tiempo de manera
exacta. El Atmega 1280 cuenta con dos timers de 8 bits (pueden contar
hasta 256 pulsos) y 4 timers de 16 bits (2^16 pulsos). El timer0
también se puede utilizar para generar una señal
de PWM
pero esta vez sólo se va a ver lo necesario para generar la
interrupción de 30 ms requerida para el funcionamiento del
servo.
La señal de reloj para el timer se puede obtener a partir
del
reloj del micro teniendo un prescaler para reducir su frecuencia o
también se puede obtener a través de una
señal de
reloj conectada a un pin externo (T0 pin).
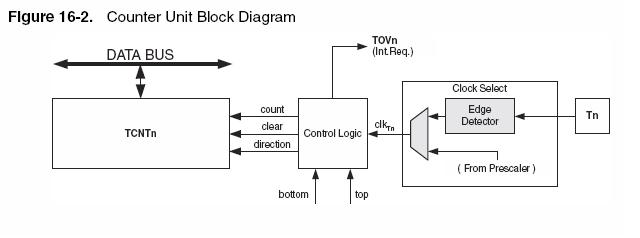
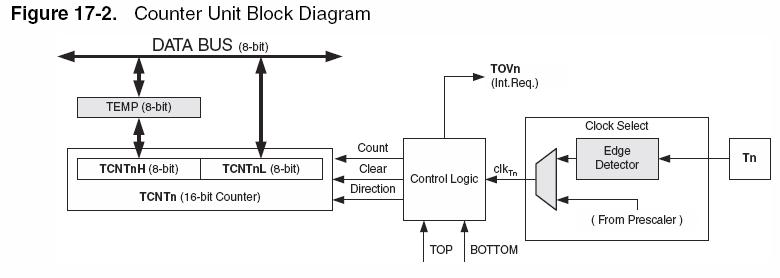
El esquema del registro encargado de llevar la cuenta es el siguiente:
TCNT0 es el registro de 8 bits donde se lleva la cuenta de los pulsos
del reloj (interno o externo)
Señales:
count: incrementa o decrementa la cuenta de TCNT0 con cada pulso de
reloj.
direction: selecciona entre incremento o decremento de TCNT0.
clear: pone todo los bits de TCNT0 a 0.
CLKtn: la señal de reloj.
top: indica que TCNT0 ha alcanzado su valor máximo, el valor
máximo lo podemos asignar en el registro OCR0A.
bottom: TCNT0 ha alcanzado el valor mínimo 0x00.
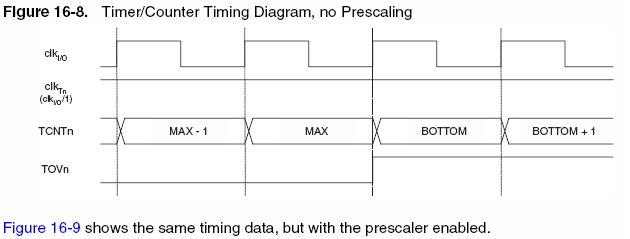
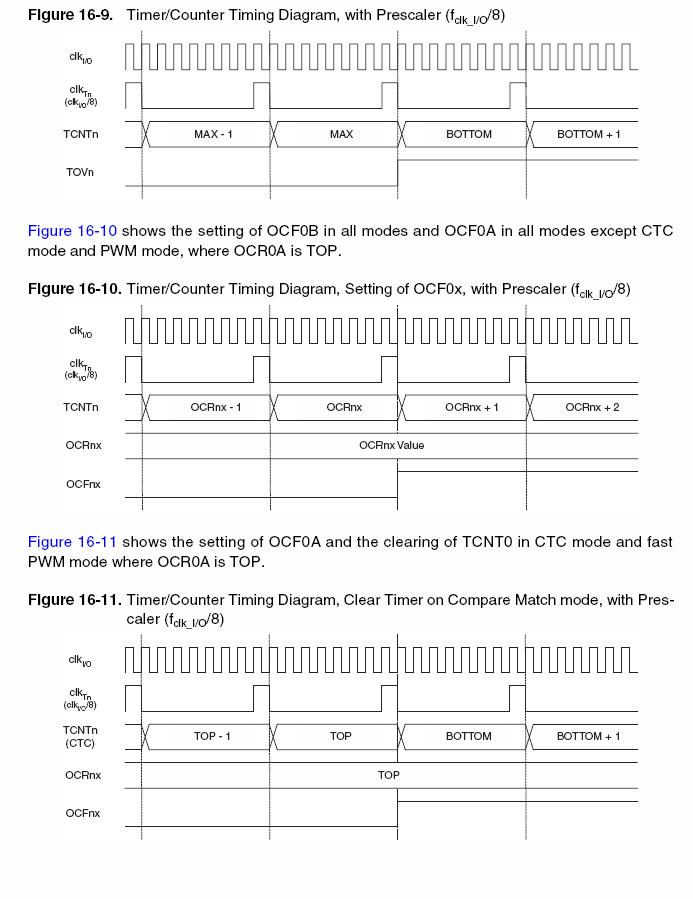
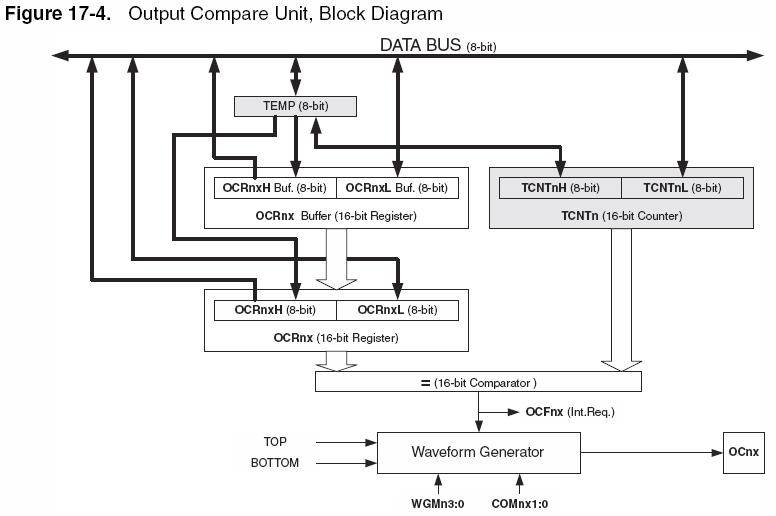
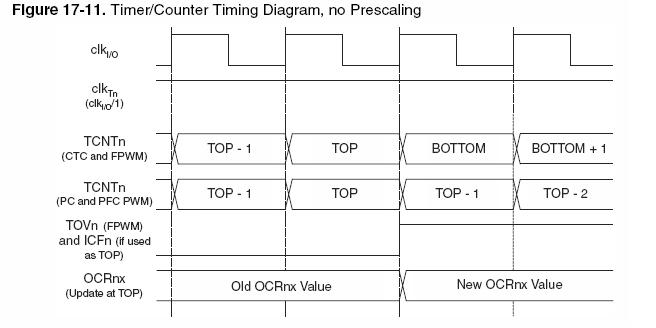
El hardware del timer compara de manera continua la cuenta de TCNT0 con
el valor de los registro OCR0A y OCR0B.
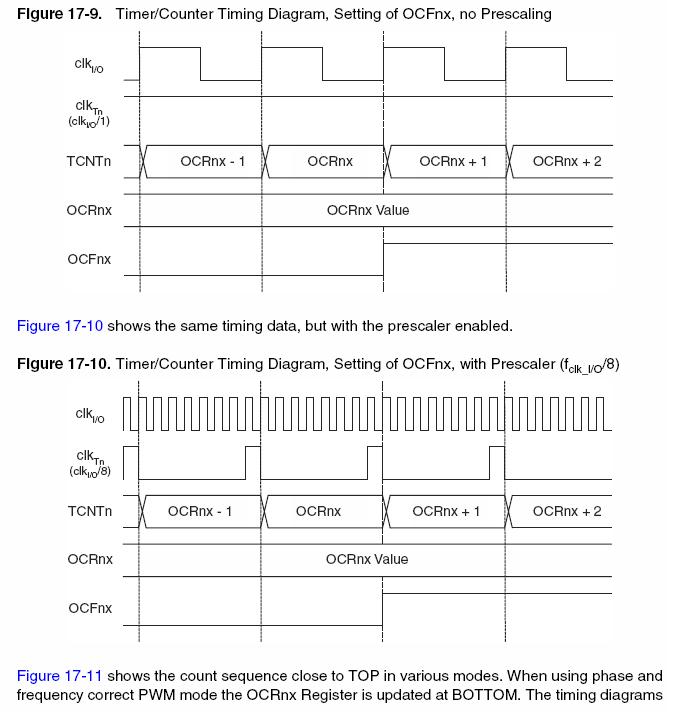
El modo más simple de funcionamiento del timer consiste en
incrementar el valor del registro TCNT0 con cada pulso de reloj, cuando
se alcanza su valor máximo (0xFF) el registro se pone a 0x00
y se activa el flag de interrupción TOV0, una vez que la
interrupción es atendida este flag se limpia. En el registro
OCR0A podemos almacenar un valor y seleccionar el modo de
funcionamiento en el que el timer se resetea a 0x00 cuando el valor de
la cuenta de TCNT0 coincide con el valor almacenado en OCR0A, cada vez
que esto ocurre se pone a 1 el flag de interrupción OCF0A
pudiendo lanzar la interrupción correspondiente.
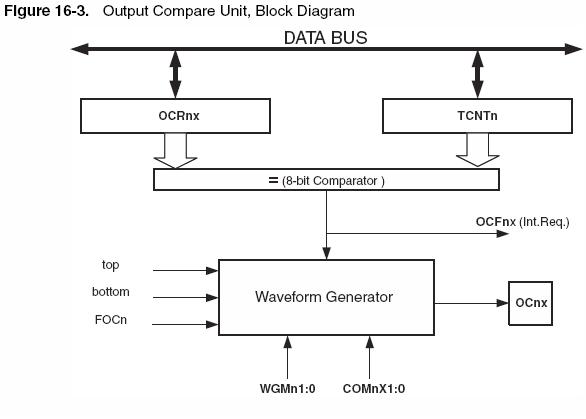
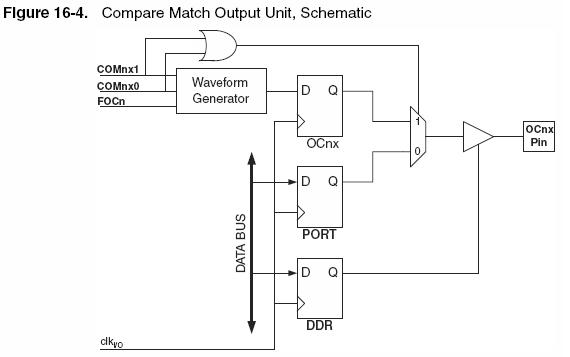
Los times pueden ser configurados como pines de salida, en la imagen
0Cnx es un pin del microcontrolador, podemos hacer que el timer ponga a
1 ó 0 el pin de salida cada vez que el valor de TCNT0
coincide con el de los registros de comparación, lo que nos
sirve para generar distintas señales liberando de
instrucciones que ejecutar al microcontrolador.
Diagramas de tiempos.
Registros Timer0 para generar la interrupción requerida por
el servo.
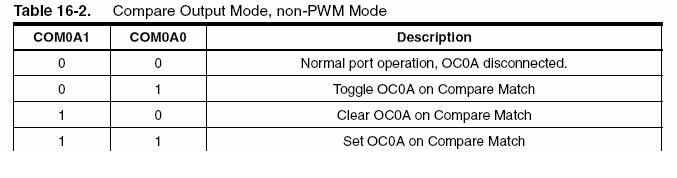
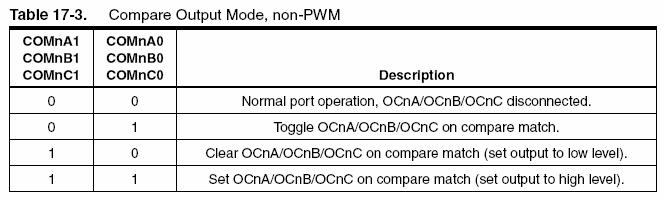
Los bits 7 y 6, COM0A1 y COM0A0 controlan el comportamiento del pin de
salida OC0A, en el registro DDR el pin debe de estar con 1 para que
pueda funcionar como salida. En el modo del timer que vamos a usar
(contador, no para generar una señal PWM) sus posibles
configuraciones son las siguientes:
Lo que nos permite que el pin OC0A se ponga a cero, se ponga a uno, o
se invierta cuando el valor de los registros OCR0A y TCNT0 coincidan,
también podemos seleccionar que no haga nada que es el caso
00 y el que nos interesa para controlar el servo y lanzar la
interrupción.
Bits 5 y 4, COM0B1 y COM0B0: lo mismo que en el caso anterior pero para
el pin de salida OC0B en lugar de OC0A, el registro con el que se
compara TCNT0 es OCR0B.
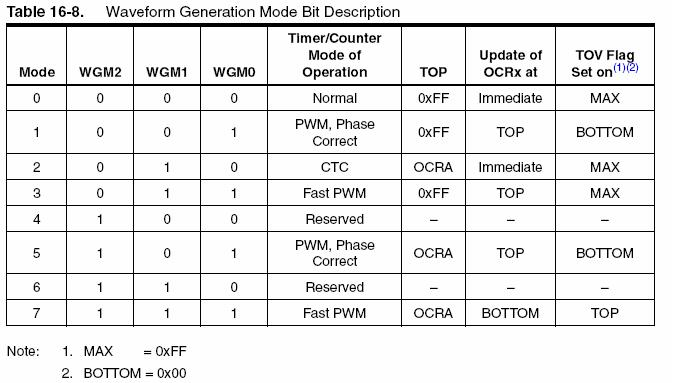
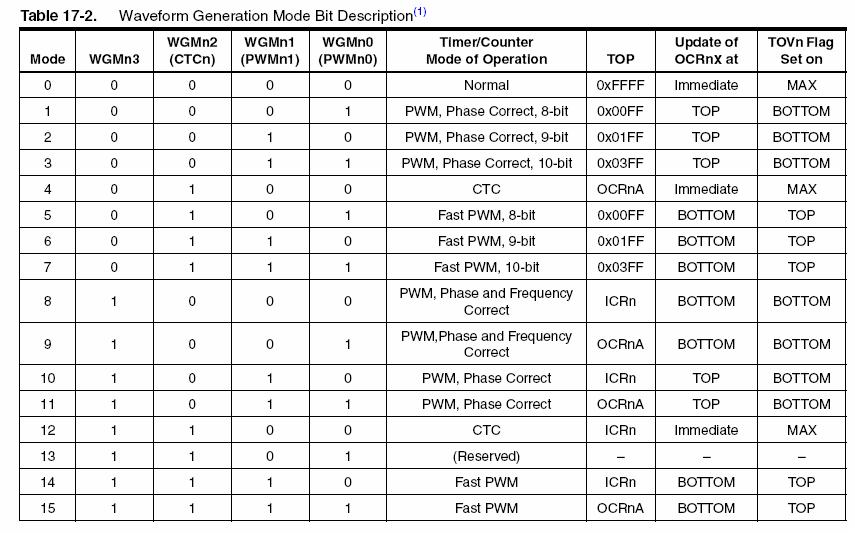
Bits 1 y 0, WGM01:0: (Waveform Generation Mode): junto con el bit WGM02
del registro TCCR0B determinan como cuenta TCNT0, la
situación del valor máximo a contar y la forma de
onda generada en los pines de salida. Los modos de funcionamiento
soportados por el timer son los siguientes: Normal Mode, Clear Time on
Compare Match (CTC) y otros dos modos de salida para generar
una señal de PWM que de momento no interesan.
En el modo 0 se cuenta hasta 255 y cuando se pase este valor se lanza
la interrupción de desbordamiento si está
habilitada, en el modo 2 se cuenta hasta el valor almacenado en OCRA
reseteando la cuenta cuando lo alcanzamos y lanzando la
interrupción correspondiente, si por cualquier motivo
sobrepasamos el valor de OCRA en TCNT0, puede ser porque realizamos una
operación de escritura en alguno de los registros, el
registro TCNT0 alcanzaría el valor 255 lanzando la
interrupción de desbordamiento al pasar a 0x00.
Bit 7, FOC0A ( Force Output Compare A): sólo
está activo cuando tenemos seleccionado un modo distinto a
los de PWM (modo normal o CTC). Poniendo el bit a uno la
salida OC0A es cambiada conforme su configuración
en los bits COM0A1:0, no generá ninguna
interrupción ni limpia el registro que lleva la cuenta.
Bit 6, FOC0B (Force Output Compare B): lo mismo que el bit anterior
pero para OC0A con los mismos registros cambiando B por A.
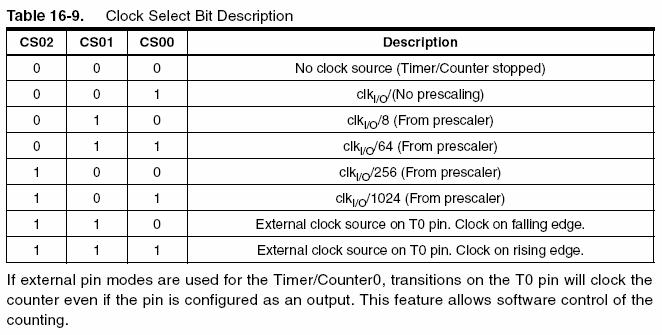
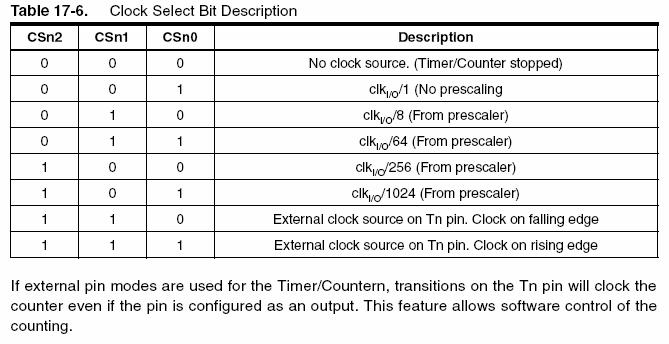
Bits 2:0, CS02:0 (Clock Select): seleccionar el reloj del timer y por
cuanto dividimos su frecuencia (prescaler):
Podemos generar la cuenta mediante soft cambiando el estado del pin T0,
un paso de 1 a 0 o al revés incrementarían o
decrementarían en uno la cuenta del registro TCNT0.
El registro donde se lleva la cuenta, podemos leer y escribir sobre
él, si escribimos sobre él mientras se
está contando deshabilitamos todas las operaciones de
comparación que vayan a tener lugar en el siguiente ciclo de
reloj, por lo que corremos el riesgo de saltarnos una
comparación y que el reloj siga contando hasta 0xFF pasando
a 0x00, y seguiría incrementandose la cuenta alcanzando el
valor del registro OCR0x a comparar.
En este registro tenemos un valor que se compara de manera continua con
el registro anterior, cuando éstos coinciden se
dispará una interrupción o se cambia el estado
del pin de salida OCA0.
Lo mismo que para el registro anterior cambiando la letra A por B.
Bit 2, OCIE0B (Timer/Counter Output Compare Match B Interrupt Enable):
cuanto está puesto a 1 si el valor de OCR0B coincide con
TCNT0 se dispará una interrupción,
además debe estar puesto a 1 el bi GIE,
saltaríamos al vector de
interrupción TIMER0_COMPA_vect.
Bit 1, OCIE0A (Timer/Counter0 Output Compare Match A Interrupt Enable):
lo mismo que el anterior cambiando B por A.
Bit 0, TOIE0 (Timer/Counter0 Overflow Interrupt Enable): la
interrupción por desbordamiento del timer 0 está
habilitada, es decir cuando TCNT0 alcance 255 y se incremente 1 pasando
a 0 se disparará la interrupción, debe esta
puesto a 1 GIE e iremos al vector de
interrupción TIMER0_OVF_vect (consultar).
Son los flags de las interrupciones anteriores, cuando están
activos junto a los bits anteriores y GIE salta la
interrupción, el flag se limpiar por hardware una vez que la
interrupción es atendida.
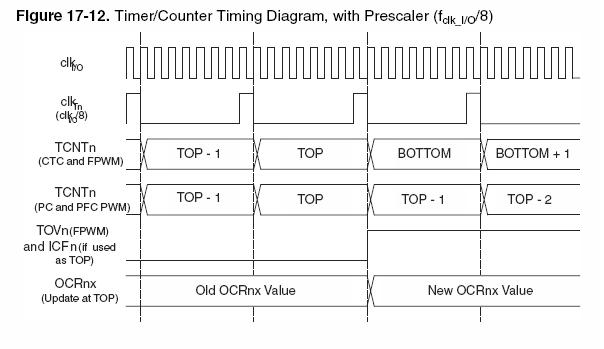
El timer 0, 1, 3, 4, y 5 comparten el mismo
prescaler, pero puede haber distintas configuraciones de prescaler para
cada uno de ellos. Si se usa el reloj del micro como entrada
al prescaler (que es lo que se va a usar) podemos obtener una
señal de reloj a la salida del prescaler de Fosc/8, Fosc/64,
Fosc/256 y Fosc/1024.
Para el servo se necesita generar una interrupción de manera
periódica cada 10-30 ms, en nuestro caso vamos a elegir 30
ms lo que permite que el micro tenga más tiempo entre
interrupción e interrupción para ejecutar
código. El timer 0 sólo usa un registro (TCNT0 )
para llevar la cuenta y por tanto sólo tenemos 8 bits,
podemos contar hasta 255, el cristal externo del microcontrolador tiene
una frecuencia de 16 MHz, si dividimos esta frecuencia entre el valor
de prescaler máximo la frecuencia de reloj que entrar al
módulo del timer 0 es de 15625 Hz, es decir cada
incremento en el registro TCNT0 se corresponde con un tiempo de 64
microsegundos, por lo que se podrán contar 256 pulsos de
reloj hasta que el registro TCNT0 pase de valer 0xFF a valer
0x00 y dispare la interrupción de desbordamiento que genera
la señal necesaria para el servomotor. 256*64uS= 16.384
ms es el tiempo más largo que podemos conseguir
con el timer 0 y un reloj de 16 MHz, se nos queda corto ya que
necesitamos casi el doble, por lo que este timer no valdrá
para nuestro fin y aún hay que esperar para empezar a
programar...
Timer 1, 3, 4 y 5. 16
bits.
La principal diferencia de estos timers con el anterior es
el uso de registros de 16 bits (2 registros de 8 bits) para
llevar la cuenta de pulsos y hacer las comparaciones en lugar de los de
8 bits del timer 0, lo que nos permite contar tiempos mucho
más largos que en el caso anterior. Para acceder a los
registros de 16 bits de los timers debemos hacerlo mediante el bus de
datos del microcontrolador y éste tiene sólo 8
líneas, por lo que debemos hacerlo en dos pasos, se apoyan
en un registro temporal que tiene cada timer para guardar el byte alto
cuando se accede al byte bajo, programando en C el compilador maneja
toda la operación de lectura/escritura por lo que para leer
y escribir en ellos sólo tenemos que usar el operador '='.
Lo que si hay que tener en cuenta es deshabilitar las interrupciones
que puedan modificar los registros de los timers a los que accedemos
desde el main y modifique la ISR, para no coger un byte actualizado por
la interrupción y otro no actualizado leído o
escrito antes de la interrupción.
Al igual que en el caso anterior la señal de reloj puede ser
externa o interna.
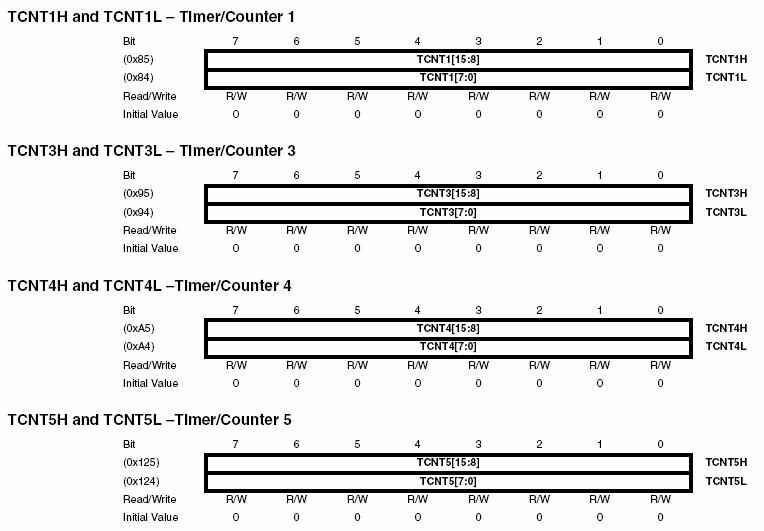
El contador, el significado de las señales es el mismo que
en el anterior.
El esquema es como el anterior, dos registros para llevar la cuenta en
lugar de uno y un registro temporal de apoyo para mandar los datos en
dos pasos a través del bus de 8 bits, cuando se lee o se
escribe el byte bajo se mete el byte alto en el registro temporal, lo
que permite al micro leer o escribir todo el valor del registro de 16
bit utilizando sólo un ciclo de reloj.
Estos timers se pueden usar para generar señales como en el
timer 0 y además tienen un hardware para capturar una
señal de entrada y determinar su frecuencia, duty cicle,
etc.. pero sólo se va a comenar lo necesario para generar la
interrupción cada 30 ms requerida por el servo.
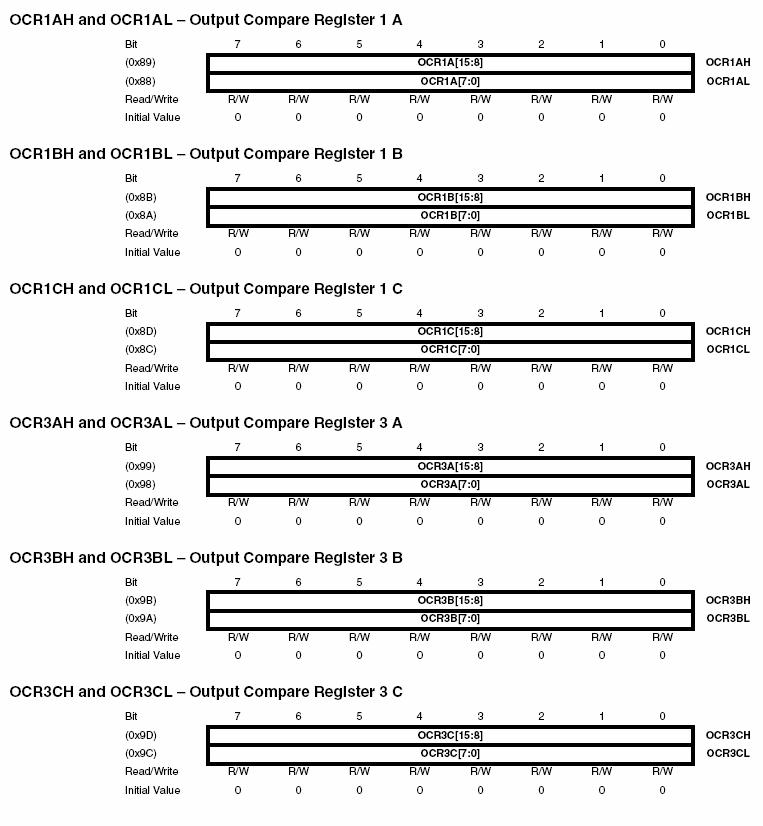
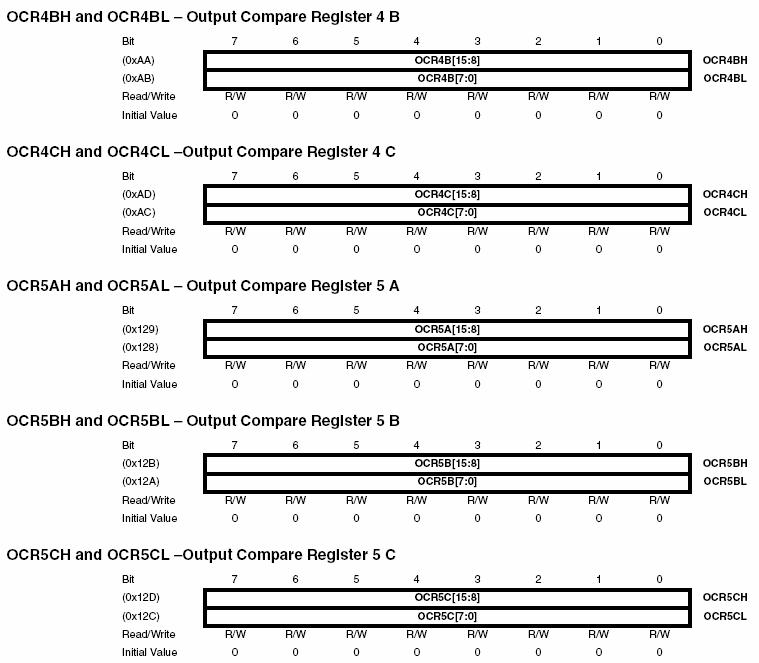
El registro que lleva la cuenta es comparado continuamente con tres
registros de 16 bits (3 pines de salida por timer) para generar los
diversos eventos.
Cuando ambos registros contienen el mismo valor se activa el flag OCFnx
en el siguiente ciclo de reloj que dispara la interrupción
si ésta está habilitada, se limpia cuando la
interrupción es ejecutada o escibiendo un 1 en su bit en el
registro correspondiente. Cualquier operación de escritura
que hagamos sobre TCNTn bloquea cualquier operación de
comparación que vaya a tener lugar en el siguiente ciclo de
reloj.
Entre los distintos modos de funcionamiento de los timers los que nos
interesan para el servo son el Normal Mode y el CTC Mode que funcionan
igual que en el timer anterior.
Diagrama de tiempos y eventos.
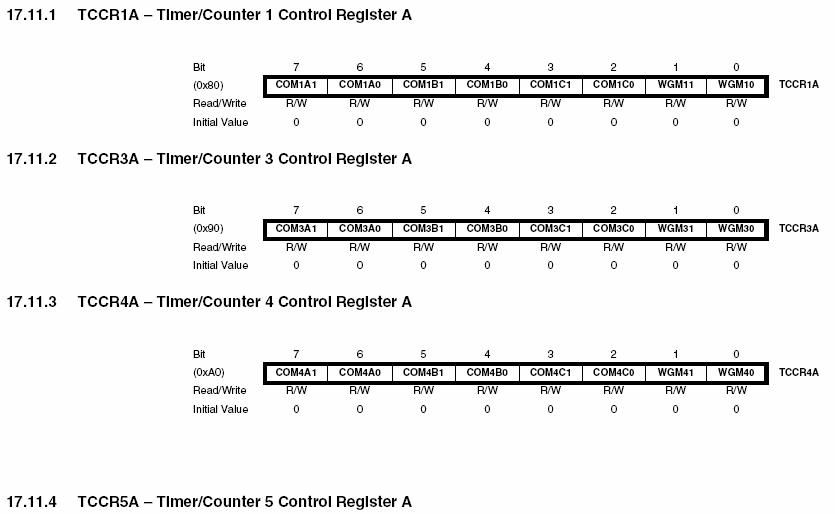
Registros timers 16 bits.
Bit 7:6, (COMnA1:0: Compare Output Mode for
Channel A)
Bit 5:4, (COMnB1:0: Compare Output Mode for Channel
B)
Bit 3:2, (COMnC1:0: Compare Output Mode for Channel C)
Establecen el comportamiento de los 3 pines de salida asociados a cada
timer igual que en el timer 0.
Bit 1:0, WGMn1:0 (Waveform Generation Mode): junto con los bits WGMn3:2
del registro TCCRnB seleccionan el modo de funcionamiento del timer.
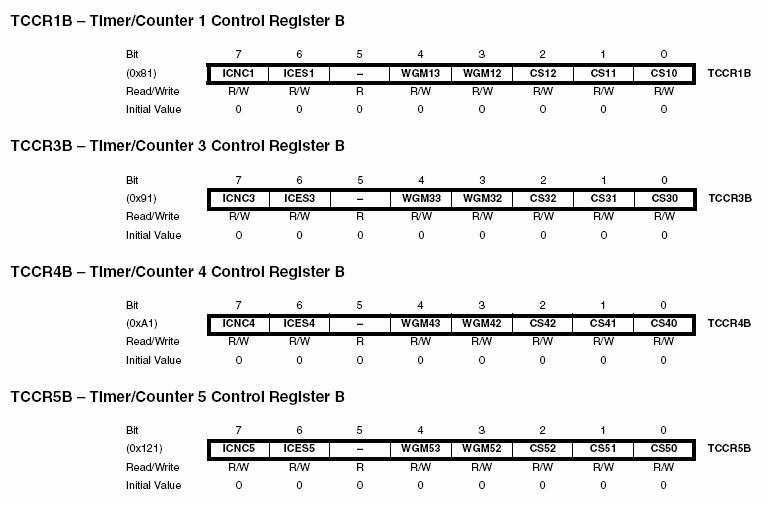
Bit 7, ICNCn (Input Capture Noise Canceler): se utiliza para
el modo en el que el timer captura una señal, no lo usamos
aquí.
Bit 6, ICESn (Input Capture Edge Select): igual que el
anterior.
Bit 4:3, WGMn3:2 (Waveform Generation Mode): comentados en los
registros anteriores, seleccionan el modo de funcionamiento del timer
según la tabla anterior.
Bit 2:0, (CSn2:0: Clock Select): seleccionan el reloj que entra al
timer y su prescaler.
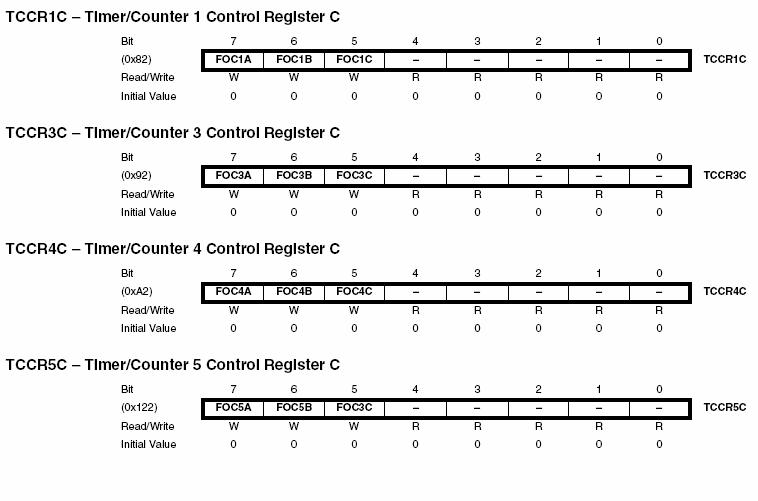
Bit 7, FOCnA (Force Output Compare for Channel A)
Bit 6, FOCnB (Force Output Compare for Channel B)
Bit 5, FOCnC (Force Output Compare for Channel C)
Sólo tienen efecto cuando el timer está en un
modo distinto al de PWM, fuerza una comparación y los pines
de salida asociados al timer toman un valor según la tabla
anterior 17-3. La interrupción asociada a la
comparación entre el registro que lleva la cuenta y los
registros de 16 bits no salta y la cuenta no se pone a cero.
Estos registros son donde llevamos la cuenta de los pulsos y su valor
representa el tiempo que ha pasado.
En estos registros se almacena el valor que se compara continuamente
con los registros anteriores que llevan la cuenta, y cuando tenemos una
coincidencia en ambos se activa el flag de interrupción
correspondiente y se dispara si está
habilitada, los pines de salida del timer cambian su valor
dependiendo de su modo de funcionamiento.
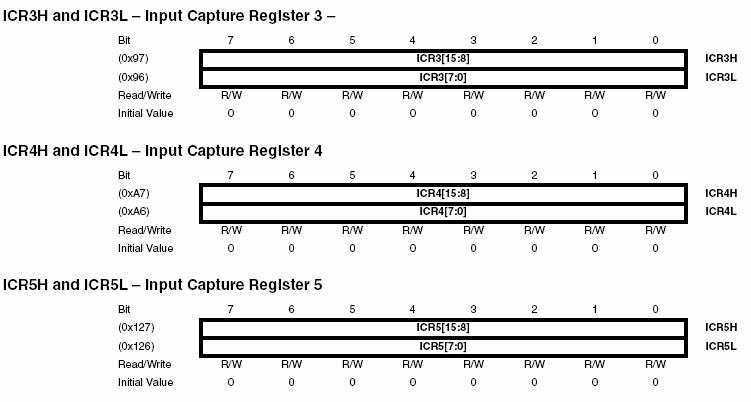
Registros utilizados para el modo de captura del timer, ya se vera
cuando se requiera.
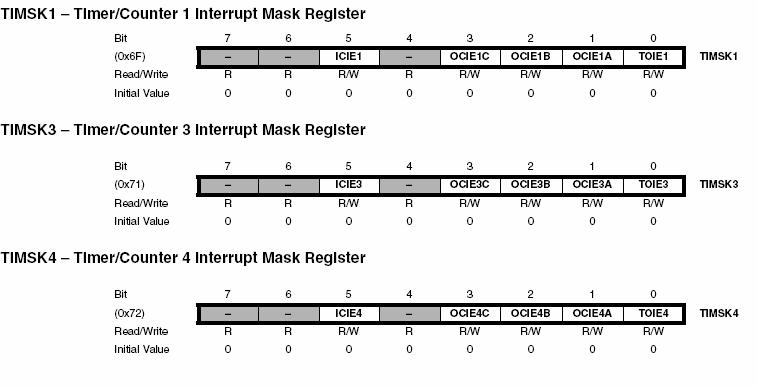
Bit 5 – ICIEn: Timer/Countern, Input Capture Interrupt Enable
Bit 3 – OCIEnC: Timer/Countern, Output Compare C Match
Interrupt Enable
Bit 2 – OCIEnB: Timer/Countern, Output Compare B Match
Interrupt Enable
Bit 1 – OCIEnA: Timer/Countern, Output Compare A Match
Interrupt Enable
Bit 0 – TOIEn: Timer/Countern, Overflow Interrupt Enable
Estos bits se corresponden con las máscaras de
interrupción, si el bit está a 1 junto al bit GIE
y la condición de la interrupción tiene lugar se
activa el flag de interrupción y saltamos a su vector de
interrupción. Cada timer tiene 5 interrupciones, 3 ocurren
cuando el valor de la cuenta es igual al valor almacenado en uno de los
3 registros que se comparan constantemente con TCNTn, 1
interrupción cuando se desborda (incrementamos el
valor máximo 0xFFFF y pasamos a 0x0000) el registro
TCNTn en el que almacenamos la cuenta de pulsos y otra
interrupción asociada al modo de captura de señal.
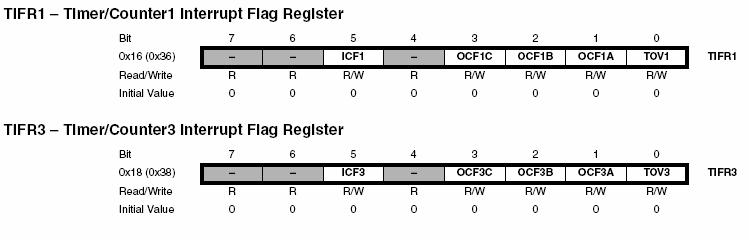
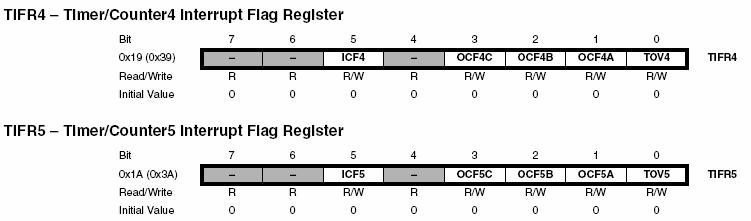
Bit 5 – ICFn: Timer/Countern, Input Capture Flag
Bit 3– OCFnC: Timer/Countern, Output Compare C Match Flag
Bit 2 – OCFnB: Timer/Counter1, Output Compare B Match Flag
Bit 1 – OCF1A: Timer/Counter1, Output Compare A Match Flag
Bit 0 – TOVn: Timer/Countern, Overflow Flag
Estos bits son los flags de las interrupciones anteriores, se limpian
al atender a la interrupción o escribiendo un 1 en ellos.
Cada bit tiene su vector de interrupción: (ejemplo para el
timer 4).
Lista de vectores de interrupción.
Tenemos 4 timers y un montón de opciones que configurar, por
lo que vamos a ver que necesitamos para generar la
interrupción cada x tiempo.
Nuestro microcontrolador debe generar un pulso entre 0.3 y 2 ms cada
10-30 ms, vamos a poner un tiempo máximo de 40 ms
así podemos ir asignando frecuencias por encima y por debajo
de las indicadas para ver que efectos tiene hacer ésto en el
servomotor. Partimos de un reloj de 16 MHz y tenemos un registro de 16
bits para llevar la cuenta, por lo que podemos contar 2^16 = 65536
pulsos. Cada incremento en este registro representa un tiempo de 1/(16
MHz) = 0.0625 us, por lo que el tiempo máximo con un
prescaler de 1 que podemos contar será 65536*62.5^(-9) =
4.096 ms si no me he confundido con la calculadora.. por lo que tenemos
que seleccionar un valor de prescaler mayor, el siguiente valor que
podemos seleccionar es 8, la frecuencia del reloj que entra a nuestro
timer en lugar de 16 MHz ahora sera de 2 MHz, por lo que el tiempo
máximo que podemos contar con el registro de 16 bits
siguiendo los pasos anteriores es de 4.096*8 ms = 32.768 ms.
Si buscamos la frecuencia de 40 ms tendremos que seleccionar el
prescaler de 64 que proporciona una cuenta máxima de 262.144
ms según los cálculos anteriores. Nosotros
buscamos un rango de frecuencias/períodos de entre 5ms y 40 ms, por lo que
cuando llegue el tiempo de cuenta deseado el registro que lleva
ésta se debe resetear y lanzar la interrupción,
para hacer esto debemos seleccionar el CTC mode y habilitar los bits de
interrupciones correspondientes, al seleccionar el modo CTC el valor al
que se resetea el registro TCNTn y activa la interrupción de
comparación se encuentra en OCRnA.
No necesitamos ningún pin externo por lo que no tenemos que
mirar las conexiones al exterior de la placa, en principio cualquiera
de los timers de 16 bits nos vale, así que vamos a
seleccionar el timer 4 por ejemplo. Con un reloj de 16/64 MHz = 250 KHz
cada incremento en TCNT4L se corresponde con un tiempo de 4
microsegundos, por lo que el valor con el que debemos comparar para
contar hasta 40 ms es: 40ms/4us = 10000, por lo que en OCR4AL deberemos
escribir 00010000 y en OCR4AH 00100111
(OCR4A=0x2710; se debe asignar así, de la otra forma byte a
byte da un resultado no esperado en C), con estos valores de
comparación tendremos una interrupción cada 40
ms. El valor de estos registros se irá variando en el
programa para tener períodos comprendidos entre 5 ms y 40 ms para ver
como reacciona el servo.
En el registro TIMSK4 debemos poner a 1 el bit OCIE4A y poner a 1 el
bit GIE en SREG para habilitar la interrupción que
tendrá lugar cuando el valor de la cuenta coincida con el
valor de comparación.
Lo primero es escribir un programa simple que configure el timer y la
interrupción para comprobar todo lo anterior.
Los registros involucrados en la configuración y sus bits
son los siguientes:
TIMSK4 : OCIE4A
SREG: GIE
OCR4AL: todos.
OCR4AH: todos.
TIFR4: OCF4A
TCCR4B: WGM43:2, CS42:0
TCCR4A: COM4A1:0, WGM4:0 //Programa para configurar el
timer 4, T=40ms. Salida Pin A7. #include
<avr/io.h> #define F_CPU
16000000UL #include
<util/delay.h> #include
<avr/interrupt.h>
void
inicializar_timer4(void);
int main(void) {
inicializar_timer4();
while(1)
{
} } void
inicializar_timer4(void) //Configura el timer y la
interrupción. {
DDRA |= (1<<PA7); //Puerto
A7 pin osciloscopio
OCR4A= 0x2710;
TCCR4B
|=((1<<WGM42)|(1<<CS41)|(1<<CS40));
//Los bits que no se tocan a 0 por defecto
TIMSK4 |= (1<<OCIE4A);
sei(); }
ISR(TIMER4_COMPA_vect) {
PORTA |=(1<<PORTA7);
_delay_ms(20);
PORTA &= ~(1<<PORTA7);
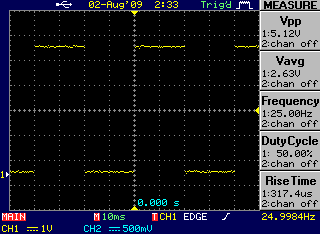
TIFR4 |= (1<<OCF4A); } La salida que se puede observar en el pin A7 del micro es
la buscada, una señal con un período de 40 ms creado por el
Timer4.
Se ha hecho un programa que
permite variar el período entre 4ms y 50 ms y el ancho del pulso
entre 50 us y 3 ms para ver como afectan los distintos períodos
a un servo analógico y un servo digital, el código debo
empezar a ordenarlo. código completo.
Hay varias cosas a tener en cuenta, la interrupción del timer
debería ser una de las más importantes del
hexápodo por lo que hemos de elegir el timer con una prioridad
más alta, cuando entramos en una ISR se deshabilitan todas las
interrupciones, por lo que si en esa ISR tenemos mucho código y
es lenta nuestra interrupción del timer que genera los pulsos
para el servo no lo haría hasta salir de la ISR anterior, con un
resultado posiblemente desastroso para el robot. Por ello las ISR deben
de ser lo más rápidas posibles sólo con el
código necesario (para no dejar esperando a las demas), si hay
alguna interrupción vital (y de mayor prioridad) pues
habrá que habilitar el bit GIE nada más entrar en la ISR,
ésto se puede hacer pasandole el siguiente argumentoISR(XXX_vect, ISR_NOBLOCK)
.
En el programa hay que hacer que en la pantalla salga el valor real del
tiempo en microsegundos del ancho de pulso en lugar del valor del adc
del potenciometro (que es el que genera este tiempo).
Respecto a los resultados los servos digitales parecen bastante mejores
que los analógicos, en el analógico nada más pasar
el ancho de pulso mínimo o máximo el servo se pone a
vibrar y dependiendo del período lo hará más o
menos. Sin embargo el digital lleva un microcontrolador en su
electrónica que procesa la señal y cuando se le manda un
pulso que no está dentro de sus límites lo ignora, por lo
que no vibra al sobrepasar los valores de pulso max y min, con un
período muy por encima o por debajo de los 10-30 ms los
movimientos parecen más bruscos, pero la primera
impresión del servo chino ha sido buena (tengo poca experiencia
con servos). Otra ventaja de los digitales es que el microcontrolador
de su placa manda más pulsos al motor en el período que
el analógico (un pulso), por lo que su par es "más
continuo" y vibrará menos con carga, el analógico
sólo hace fuerza cuando le llega la señal del pulso y
durante el Ton.
Me queda aprender mucho de servos ya que no he visto ninguno por dentro
para poder interpretar mejor los resultados, he de hacer las mismas
pruebas con carga y hacer el programa bien para que salga el tiempo de
pulso en lugar del valor del ADC, pero ya volveré a ello que de
momento me interesa más ir viendo periféricos y registros
del AVR, además tengo que googlear mucho para buscar
información sobre los servos y poder realizar pruebas
coherentes. En principio y sin tener ni idea del tema diría que
los servos chinos son opción, pero prefiero esperarme a
realizar pruebas con par a vencer en el eje.
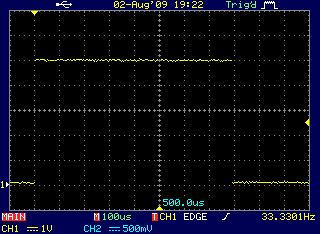
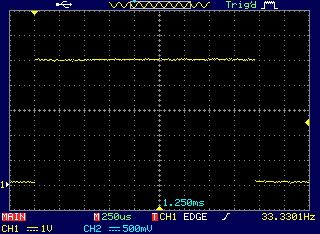
Respecto a los tiempos del servo chino el centro está
apróximadamente sobre los 1.5 ms, su tiempo max y min en los que
ha alcanzado el giro máximo en cada dirección son los de
abajo, creo que no llega a girar 180º, se debe quedar sobre los
150º, el Hitec si me ha girado los 180º. Tengo los servos
justos pero probablemente desmonte uno del todo para ver lo que lleva
dentro.
Tiempo ángulo mínimo.
Tiempo ángulo máximo.
Video del funcionamiento del programa y efecto en los servos, el
pequeño es un servo analógico de HITEC (es buena marca).
La segunda parte cuando sepa más del mundo de los servos...
Para cualquier comentario: